Context-Aware Motion Prediction for Autonomous Driving
- Institut
- Lehrstuhl für Fahrzeugtechnik (TUM-ED)
- Typ
- Masterarbeit
- Inhalt
- experimentell theoretisch
- Beschreibung
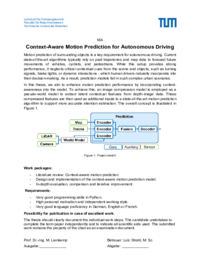
Motion prediction of surrounding objects is a key requirement for autonomous driving. Current state-of-the-art algorithms typically rely on past trajectories and map data to forecast future movements of vehicles, cyclists, and pedestrians. While this setup provides strong performance, it neglects critical contextual cues from the scene and objects, such as turning signals, brake lights, or dynamic interactions - which human drivers naturally incorporate into their decision-making. As a result, prediction models fail in such complex urban scenarios.
In this thesis, we aim to enhance motion prediction performance by incorporating context-awareness into the model. To achieve this, an image compression model is employed as a pseudo-world model to extract latent contextual features from depth-image data. These compressed features are then used as additional inputs to a state-of-the-art motion prediction algorithm to support more accurate intention estimation.
Possibility for publication in case of excellent work.
- Voraussetzungen
Requirements:
-
Very good programming skills in Python.
-
High personal motivation and independent working style.
-
Very good language proficiency in German, English or French.
-
- Software
- Python
- Tags
- FTM Studienarbeit, FTM AV, FTM AV Perception, FTM Stratil, FTM Informatik, FTM IDP
- Möglicher Beginn
- sofort
- Kontakt
-
Loïc Stratil, M.Sc.
Raum: MW 3508
Tel.: +49.89.289.15898
loic.stratiltum.de - Ausschreibung
-