Optimization of a High-Torque Humanoid Motor
- Institute
- Lehrstuhl für Angewandte Mechanik
- Type
- Semester Thesis Master's Thesis
- Content
- experimental constructive
- Description
Topic:
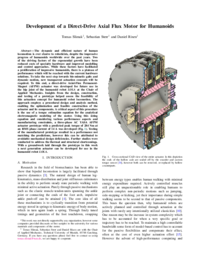
The published AFPM prototype demonstrated the feasibility of designing and building a direct-drive axial flux motor for the humanoid robot LOLA, supported by an analytical sizing framework, a full electromagnetic and mechanical design workflow, and a procedurally optimized YASA-type topology. However, the prototype also revealed several critical shortcomings; most notably excessive axial stator deformation, unreliable thermal extraction at the inner ring, and significant discrepancies between predicted and measured torque due to unintended stator–rotor contact.
The goal of this thesis is to develop the next generation of the AFPM actuator by resolving these limitations and maturing the concept toward a deployable humanoid joint module.
A first objective is the systematic analysis and redesign of the axial stator support structure. The current PEEK coil fixtures lack stiffness, causing the stator to be pulled into contact with the rotor under electromagnetic load. You will investigate alternative materials and geometries—such as reinforced composite laminates, hybrid metallic-composite structures, or redesigned load paths—that preserve magnetic transparency while providing sufficient stiffness to maintain the designed air gap.
A second objective is the advancement of thermal management strategies. Three approaches could be interesting: an actively cooled add-on heat sink, submerging the rotor in coolant and passive PCM-based heat buffering embedded in stator rings. This thesis will continue and refine these ideas by characterizing heat flow during real torque production, optimizing conduction paths from the inner ring, evaluating PCM integration under realistic cycling loads, and comparing the performance of different cooling concepts in controlled experiments.
Third, the thesis will address the gap between analytical torque predictions and real motor behavior. Due to structural deformation and friction, the prototype could not be accurately evaluated. You will develop an improved measurement setup including high-resolution torque sensing, rigid test fixturing, and magnetic field validation to establish reliable ground truth data. These measurements will feed back into improved electromagnetic models, thereby closing the loop between design, prototype, and validation.
Finally, the work will explore manufacturability and integration pathways for a humanoid-ready actuator. If feasible, the thesis may prototype key redesigned subsystems for experimental verification.
This topic ties into active research that I aim to publish. Depending on the strength of your thesis contributions, you may be invited to join as a co-author.
Application:
Please send all previous transcripts of records and your full CV to tomas.slimak@tum.de with the subject Application MA/SA/BA "name of thesis". Write a few sentences about what motivates you to apply for this thesis and why you would fit the topic. Please be specific in citing the experience/expertise that you have which would be relevant to this topic.
After submitting your application, it will be reviewed and if you are deemed suitable for the topic, you will be invited for an interview. Please be aware that part of this interview will be an oral evaluation of your background and understanding of concepts relevant to the thesis. The more preparation, creativity and initiative you are able to show, the better. It should be noted that given the iteresting but very advanced nature of this topic, only correspondingly strong students will be selected.
If you are interested in multiple theses that I am offering, do not send multiple applications, just name all the titles in a single mail. Applications and theses can be submitted in English or German as well.
- Possible start
- sofort
- Contact
-
Tomas Slimak, M.Sc.
Room: 3104
Phone: +49 (89) 289 - 15226
tomas.slimaktum.de - Announcement
-