Kraftbasierte Kollisionsdetektion in der roboterbasierten Montage (BA/SA/MA)
- Institute
- Institut für Werkzeugmaschinen und Betriebswissenschaften (TUM-ED)
- Type
- Bachelor's Thesis Semester Thesis Master's Thesis
- Content
- experimental
- Description
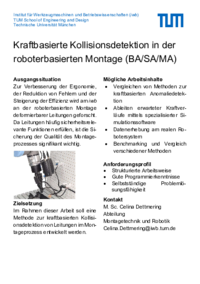
Ausgangssituation
Zur Verbesserung der Ergonomie, der Reduktion von Fehlern und der Steigerung der Effizienz wird am iwb an der roboterbasierten Montage deformierbarer Leitungen geforscht. Da Leitungen häufig sicherheitsrelevante Funktionen erfüllen, ist die Sicherung der Qualität des Montageprozesses signifikant wichtig.
Zielsetzung
Im Rahmen dieser Arbeit soll eine Methode zur kraftbasierten Kollisionsdetektion von Leitungen im Montageprozess entwickelt werden.
Mögliche Arbeitsinhalte
- Vergleichen von Methoden zur kraftbasierten Anomaliedetektion
- Ableiten erwarteter Kraftverläufe mittels spezialisierter Simulationssoftware
- Datenerhebung am realen Robotersystem
- Benchmarking und Vergleich verschiedener Methoden
- Requirements
Anforderungsprofil
- Strukturierte Arbeitsweise
- Gute Programmierkenntnisse
- Selbstständige Problemlösungsfähigkeit
Kontakt
M. Sc. Celina Dettmering
Abteilung
Montagetechnik und Robotik
Celina.Dettmeringiwb.tum.de- Possible start
- sofort
- Contact
-
Celina Dettmering
Room: MW 1304
Phone: +49 89 289 554 63
celina.dettmeringiwb.tum.de - Announcement
-