Kinematic and Dynamic Validation of a Satellite Docking Testbench
- Institute
- Lehrstuhl für Raumfahrtantriebe
- Type
- Bachelor's Thesis Semester Thesis Master's Thesis
- Content
- experimental
- Description
The rising number and evolving capabilities of small spacecraft prompt a fundamental rethink of their propulsion requirements. To address the needs of future small spacecraft, a non-toxic, high-performance propulsion system is required, offering resilience through spacecraft life-extension capabilities. The Ice2Thrust project presents Water Electrolysis Propulsion (WEP) as a promising solution, leveraging water’s storability and low toxicity to enable in-orbit refilling of satellites and form the basis of a self-sustaining space mobility architecture.
Extending the lifetime of a GEO satellite following propellant depletion has been demonstrated in 2020 by SpaceLogistics' Mission Extension Vehicle-1 (MEV-1) and again by the MEV-2 in 2021. In the case of MEV-1 and 2, mission extension was achieved by augmenting the stranded spacecraft with the service vehicle's propulsion system, while in-orbit refilling systems like OrbitFab's RAFTI or GMV's ASSIST aim to directly refill the target spacecraft, allowing the tanker to quickly move on to another customer. High suitability for mission extension operations forms a part of WEP's value proposition. Existing interfaces such as RAFTI or ASSIST are considered too heavy and complex for integration with WEP on small satellites and CubeSats. Taking advantage of the single working fluid to be transferred in WEP, a simpler and more robust interface can be designed.
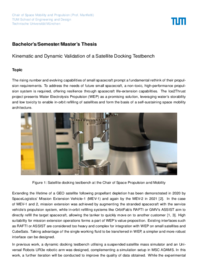
In previous work, a dynamic docking testbench utilising a suspended satellite mass simulator and an Universal Robots UR3e robotic arm was designed, complementing a simulation setup in MSC ADAMS. In this work, a further iteration will be conducted to improve the quality of data obtained. While the experimental setup has been commissioned, limitations exist that prevent it from fully reproducing a force-free environment. Validation of the simulation framework against experimental data is also needed, with emphasis on friction and contact force modelling. The scientific output of this thesis will help refine the Chair’s simulation and testing facilities in order to support the development of next-generation satellite refilling interfaces.
Tasks:
- Review of solutions for satellite docking and fluid transfer testing.
- Characterisation of test setup limitations including:
- Static and dynamic friction
- 6-DoF reproduction including satellite rotation.
- Proposal and implementation of solutions to improve force-free capabilities of experimental setup.
- Proposal and implementation of:
- Simple kinematic tests to validate simulation friction coefficients
- Dynamic tests to validate dynamic simulation parameters
- Tests to characterise 6-DoF force simulation and measurement using a robotic arm.
- Documentation and presentation of results.
- Requirements
- Student in Aerospace or Mechanical Engineering.
- Interested in robotics, experimental work, or dynamic simulation.
- Knowledge of Python highly desirable.
Please include along with your application your grade report and CV, as well as a sentence or two explaning your motivation behind pursuing this project.
- Possible start
- sofort
- Contact
-
Tomas Mrazek, M.Eng.
Phone: +33695349960
tomas.mrazektum.de - Announcement
-