ROS-based autonomous operation of a Collaborative Vibratory Plate Robot
- Institut
- Lehrstuhl für Fördertechnik Materialfluss Logistik
- Typ
- Semesterarbeit Masterarbeit
- Inhalt
- Beschreibung
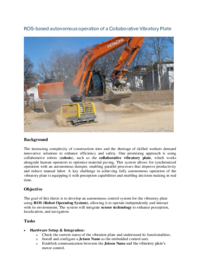
Background
The increasing complexity of construction sites and the shortage of skilled workers demand innovative solutions to enhance efficiency and safety. One promising approach is using collaborative robots (cobots), such as the collaborative vibratory plate, which works alongside human operators to optimize material paving. This system allows for synchronized operation with an autonomous dumper, enabling parallel processes that improve productivity and reduce manual labor. A key challenge in achieving fully autonomous operation of the vibratory plate is equipping it with perception capabilities and enabling decision-making in real time.Objective
The goal of this thesis is to develop an autonomous control system for the vibratory plate using ROS (Robot Operating System), allowing it to operate independently and interact with its environment. The system will integrate sensor technology to enhance perception, localization, and navigation.Tasks
- Hardware Setup & Integration:
- Check the current status of the vibration plate and understand its functionalities.
- Install and configure a Jetson Nano as the embedded control unit.
- Establish communication between the Jetson Nano and the vibratory plate’s motor control.
- Software Development:
- Develop a ROS-based control system for operating the vibratory plate.
- Implement remote teleoperation features via WLAN.
- Perception & Sensing:
- Integrate GNSS receivers for high-precision localization.
- Install additional sensors (e.g., LiDAR, IMU, depth camera) to perceive terrain conditions.
- Autonomous Navigation:
- Develop an autonomous path-planning algorithm based on the ROS navigation stack.
- Implement real-time obstacle avoidance and environmental mapping.
- Testing & Validation:
- Conduct experiments in a controlled outdoor test environment.
- Evaluate system performance in terms of navigation accuracy, perception reliability, and operational efficiency.
- Hardware Setup & Integration:
- Voraussetzungen
Requirements
- Experience with ROS/ROS2 and robotic systems.
- Knowledge of embedded computing (Jetson Nano, Raspberry Pi, etc.).
- Familiarity with sensor fusion and localization techniques.
- Proficiency in C++ and/or Python for ROS development
- Möglicher Beginn
- sofort
- Kontakt
-
Daniel Vidal, M.Sc.
Raum: 5505.01.590C
Tel.: +49 (89) 289 - 15955
daniel.vidaltum.de - Ausschreibung
-