Motion control of autonomous vehicles with Tube Nonlinear Model Predictive Control
- Institut
- Lehrstuhl für Fahrzeugtechnik (TUM-ED)
- Typ
- Semesterarbeit Masterarbeit
- Inhalt
- experimentell theoretisch
- Beschreibung
Are you looking for a chance to work on cutting-edge technology that will shape the future of transportation? Then look no further! Our research institute is currently seeking a student to work on an exciting thesis that involves the motion control of autonomous vehicles with Tube Nonlinear Model Predictive Control (MPC).
As you know, controlling the vehicle's dynamics to follow a planned trajectory is a challenging task in the world of autonomous driving. MPC is a common approach for this task, but it has its limitations. Traditional MPC formulations do not take into account parametric uncertainty or disturbances which can lead to suboptimal solutions. However, by using a tube nonlinear MPC approach [1-2], we can address these limitations by providing a guaranteed robust performance in the presence of disturbances and parametric uncertainty.
Tube MPC is a robust control method that addresses limitations in traditional Model Predictive Control by considering all sources of uncertainty in the system. It works by enclosing the predicted state of the system within a guaranteed safe region, or 'tube', which is updated at each prediction step. This approach provides a more rigorous method of controlling the system, ensuring its robustness and stability even in the presence of disturbances and uncertainties.
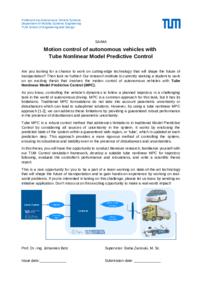
In this thesis, you will have the opportunity to conduct literature research, familiarize yourself with our TUM Control simulation framework, develop a suitable tube nonlinear MPC for trajectory following, evaluate the controller's performance and robustness, and write a scientific thesis report.
This is a rare opportunity for you to be a part of a team working on state-of-the-art technology that will shape the future of transportation and to gain hands-on experience by working on real-world problems. If you're interested in taking on this challenge, please let us know by sending an initiative application. Don't miss out on this exciting opportunity to make a real-world impact!
- Verwendete Technologien
- Python, C++, Programming, Autonomous Driving, MPC, Model Predictive Control, Vehicle Dynamics, ROS
- Tags
- FTM Studienarbeit, FTM AV, FTM Zarrouki, FTM Informatik, FTM Perception
- Möglicher Beginn
- sofort
- Kontakt
-
Baha Zarrouki, M.Sc.
Raum: MW3527
Tel.: +49 (89) 289 - 10498
baha.zarroukitum.de - Ausschreibung
-